目前的超聲波清洗機,是利用超聲波能量在液體中發(fā)出足夠的超聲波能量來執(zhí)行液體的內(nèi)部作用,超聲波清洗的原理是對清洗液產(chǎn)生實際效果,氣泡的產(chǎn)生和液體中的破裂產(chǎn)生強烈的沖擊力,其用于從物體表面去除雜質(zhì)和油脂,結(jié)合超聲波電源的發(fā)展現(xiàn)狀和超聲波電源超聲波清洗機的具體要求,提出了主電路的基本結(jié)構(gòu)和電源的控制電路,實物進(jìn)行了電路主電路和控制電路的理論設(shè)計和實驗。
設(shè)計電路主要采用芯片在超聲波功率控制中的應(yīng)用,通過使用芯片控制全橋相變電路的相移角來改變輸出信號的功率,通過控制相移角的大小可以控制占空比輸出信號,從而達(dá)到調(diào)節(jié)負(fù)載輸出功率的目的,檔采用了完整橋接電路的高功率設(shè)計,并設(shè)計了基于芯片的控制電路。
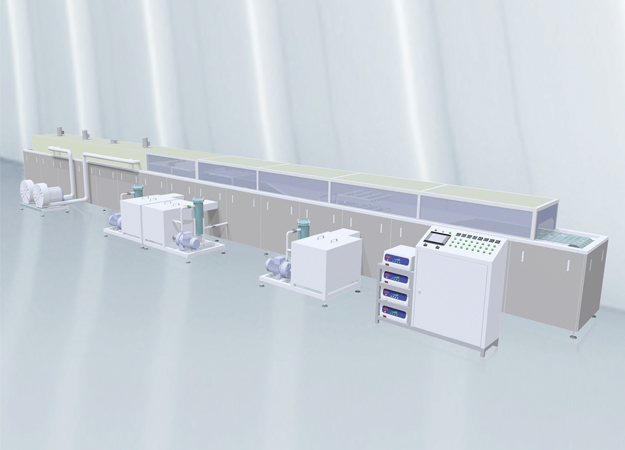
另外執(zhí)行換能器適配電路的設(shè)計,使得超聲波清洗機可以有效地執(zhí)行清洗工作,還研究了解清洗機的自動頻率跟蹤系統(tǒng),使穩(wěn)定的超聲波清洗機高效工作,對整個系統(tǒng)的實驗數(shù)據(jù)進(jìn)行修改理論設(shè)計,因此超聲波清洗機系統(tǒng)設(shè)計可行,性能指標(biāo)符合設(shè)計要求,包括清洗金屬框架主體的移動清洗和裝載和卸載,因此主體金屬結(jié)構(gòu)的它安裝有不同的要求。
當(dāng)安裝橫向?qū)к墪r,橫向?qū)к壙苫瑒拥貦M向安裝在機器人上,并且機器人由汽缸驅(qū)動以執(zhí)行垂直運動,機器人的下端安裝有清洗,并且裝載和卸載平臺鄰近控制單元設(shè)置,清洗槽可以快速被去除并完全在工件的表面上的脫模劑,這不僅有很好的清洗效果,還可提高工作效率。